逆血流而上游动纳米机器人:仿生设计聚合物游动纳米机器人实现逆血流运动
2022-05-23 08:49:56
近日,贺强教授研究团队基于可控组装构筑了金纳米壳功能化的锥形聚合物游动纳米机器人,它能将超声能量转化为自推进运动的机械能,实现逆流运动(图1)。其运动机制和微生物重新定向后进行逆流运动的“风向标”机理一致。由于这一特性,有望在药物主动输运和细胞手术等领域广泛应用。该工作以“Rational Design of Polymer Conical Nanoswimmers with Upstream Motility”为题发表于ACS Nano(IF: 15.881)。
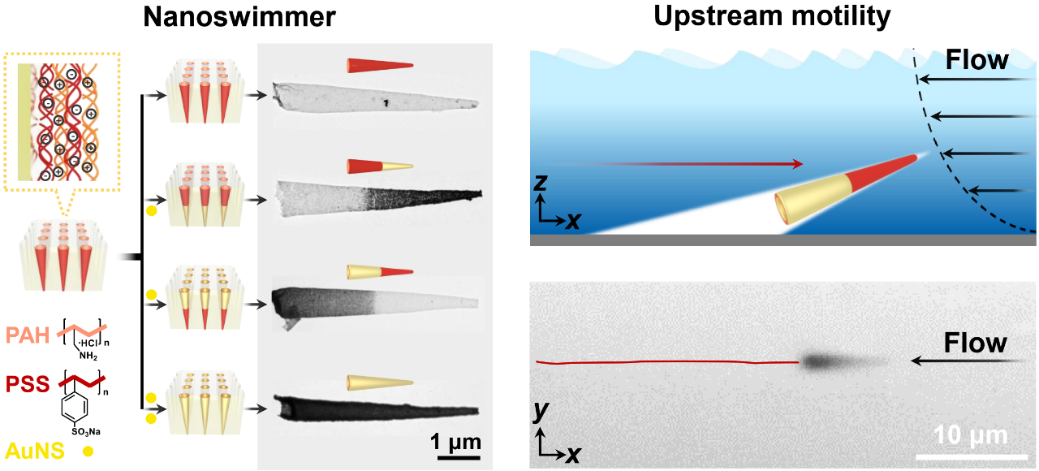
图1金纳米壳功能化聚合物游动纳米机器人的构筑及逆流能力
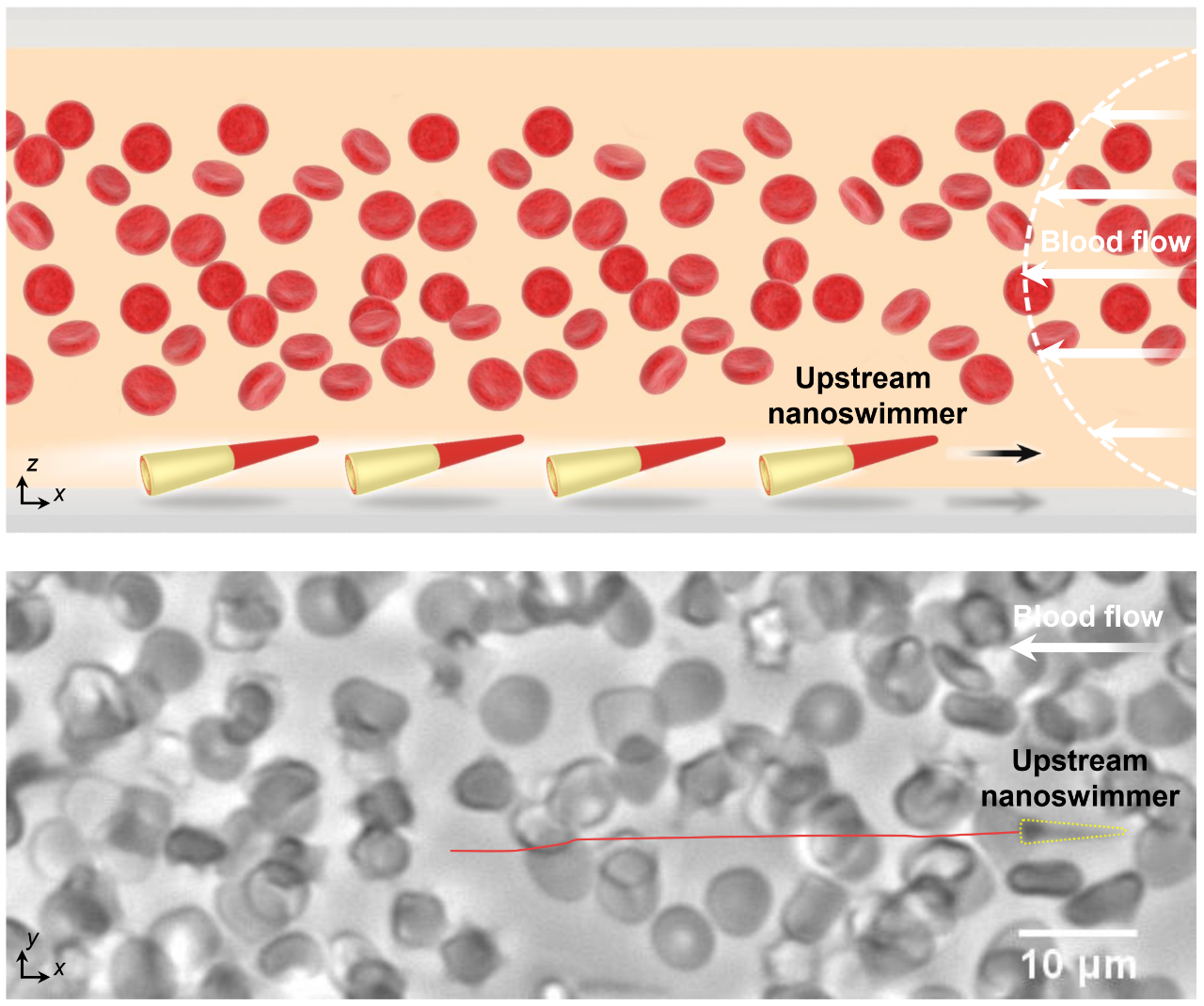
图2金纳米壳功能化聚合物游动纳米机器人逆血流运动
本工作结合模板辅助层层自组装和选择性金纳米壳功能化技术构筑了聚合物游动纳米机器人。这些纳米机器人的运动性能受金纳米壳功能化位置的影响。大端金纳米壳功能化可使聚合物游动纳米机器人保持小端朝前的运动取向,具有最大的能量转化效率,并将流体影响降至最低,其运动速度是小端金纳米壳功能化游动纳米机器人的3倍,可克服血流进行可控逆流运动(图2)。该工作为游动纳米机器人在血流中的主动靶向和清除血栓等生物医学应用提供了研究基础。
 该论文第一作者是国科温州研究院助理研究员王位,通讯作者是贺强教授和哈尔滨工业大学吴志光教授。该论文获得国家自然科学基金(22193033)和国科温州研究院启动项目(WIUCASQD2021044)的资助。
该论文第一作者是国科温州研究院助理研究员王位,通讯作者是贺强教授和哈尔滨工业大学吴志光教授。该论文获得国家自然科学基金(22193033)和国科温州研究院启动项目(WIUCASQD2021044)的资助。
原文链接:https://pubs.acs.org/doi/10.1021/acsnano.2c01979
图1金纳米壳功能化聚合物游动纳米机器人的构筑及逆流能力
图2金纳米壳功能化聚合物游动纳米机器人逆血流运动
原文链接:https://pubs.acs.org/doi/10.1021/acsnano.2c01979



