磁耦合活性机器人转子系统中的无序超均匀网络
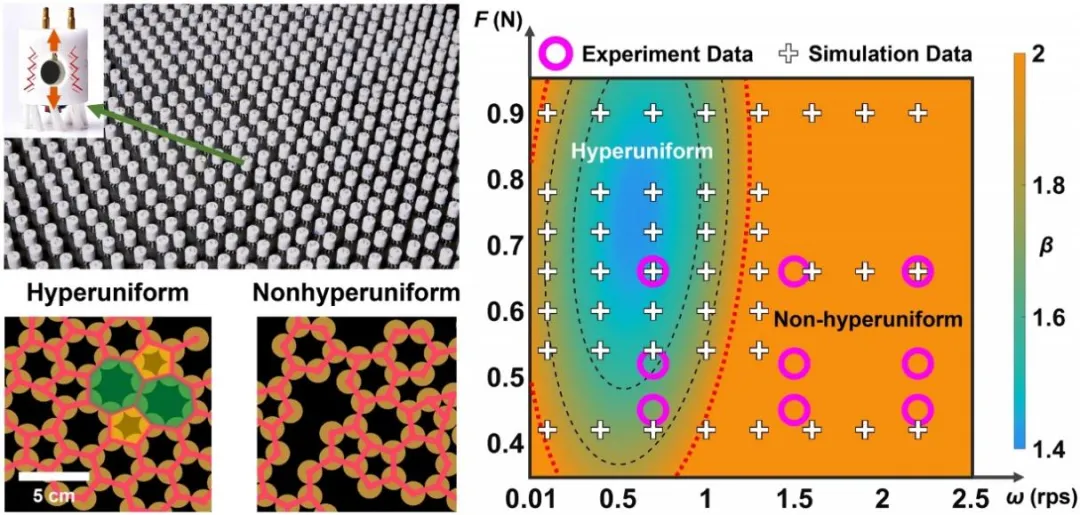
近年来得到广泛关注的无序超均匀系统具有一种隐藏的长程有序特征,表现为对大尺度密度涨落的完全抑制。这种特性赋予此类体系许多独特而新奇的性质,可以在例如光学与声学的波操控、仿生骨架结构设计、超构表面生物传感器等重要应用与装置中发挥关键作用。尽管无序超均匀状态已经在从微观粒子体系、生物组织特征到宇宙宏观结构等多尺度的物理与生物系统中得到观察与研究,但在实验上实现结构特征可控的无序超均匀材料合成与生物过程调控仍旧面临诸多挑战。针对此难题,本研究展示了一种在活性粒子系统中实现稳定无序超均匀结构的全新组织机制,并基于上千个磁耦合活性机器人转子组成的机器人物质系统进行了实验验证与调控相图研究。
近日,国科温州研究院刘雳宇团队联合亚利桑那州立大学焦阳教授与国科大杨明成研究员团队在Physical Review Letters上发表题为Hyperuniform Networks of Active Magnetic Robotic Spinners的研究论文。为了对活性粒子系统形成稳定的无序超均匀结构的机制与调控方法进行研究,研究团队设计并制造了上千个可进行受控的手性自旋运动,而且具备强度可调的三极性耦合作用的微型机器人转子,并在实验中发现此机器人物质系统涌现出多种三配位的网络结构,其中包含稳定的无序超均匀网络结构。经过系统性的实验与仿真研究,该工作进一步地揭示了通过磁耦合作用与局域活性扭转间的对抗而引入特征结构缺陷的无序超均匀结构形成机制,并构建了无序超均匀结构的调控相图。这些结果揭示了活性系统中无序超均匀态涌现的新机制,为制备具有理想特性的新型无序超均匀材料与调控疾病组织中的生物分子自组装过程提供了途径,有望在生物成像、疾病监控与纳米材料等领域得到广泛应用。
国科温州研究院刘雳宇教授、亚利桑那州立大学焦阳教授与国科大杨明成研究员为本文的共同通讯作者。国科温州研究院王璟副研究员与国科大孙子豪为本文的共同第一作者。国科温州研究院为本文的第一单位。本研究获得了国家自然科学基金委、中国博士后科学基金与国科温州研究院基金的资助。
原文链接:https://doi.org/10.1103/z2rp-21xn。



